We had a productive week in Iceland re-photographing and gathering data/equipment.

On landing we were able to see the lava from the current eruptions!

Fjalls looked like it had retreated more – as we walked across to place ground control targets.
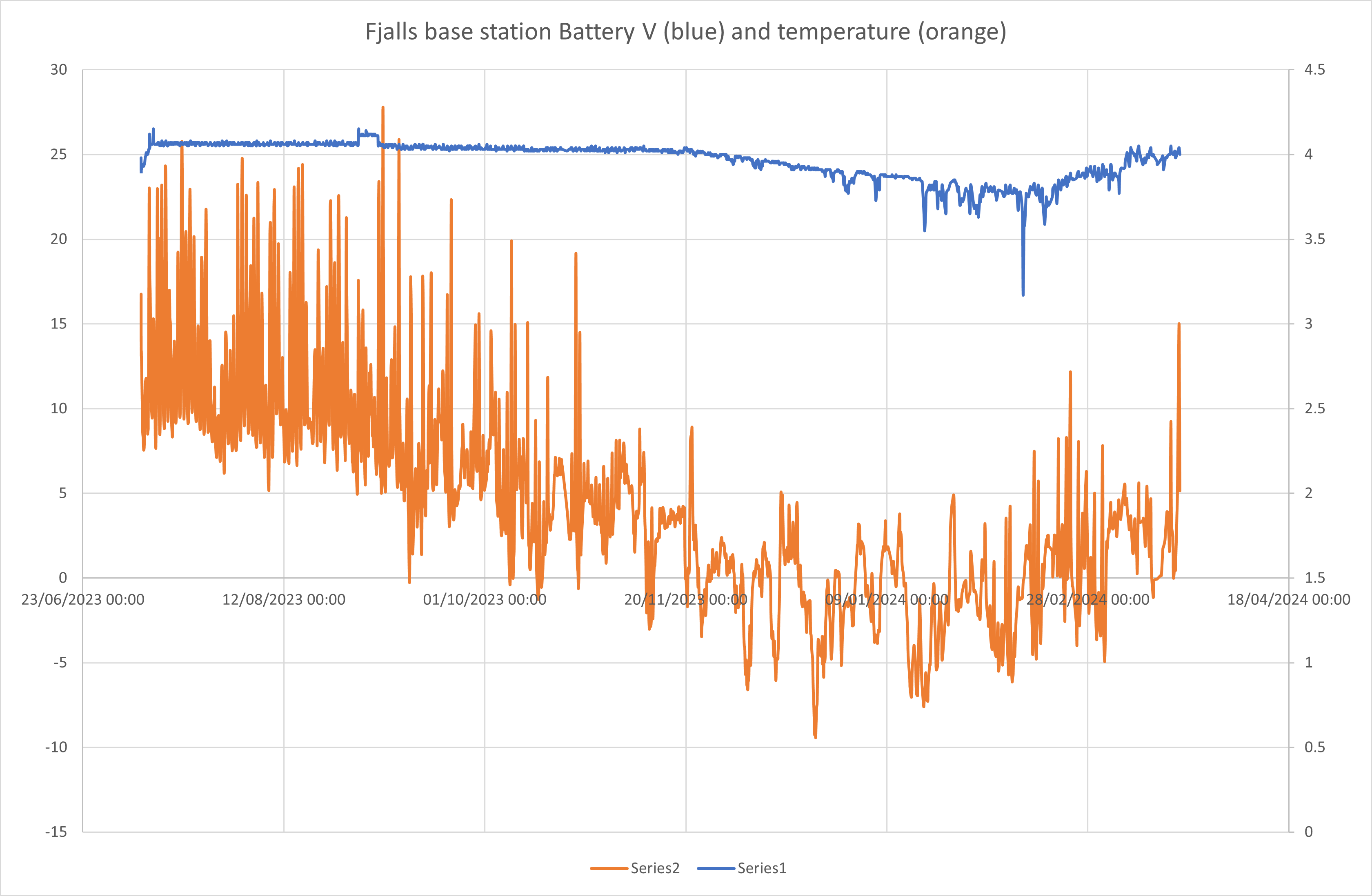
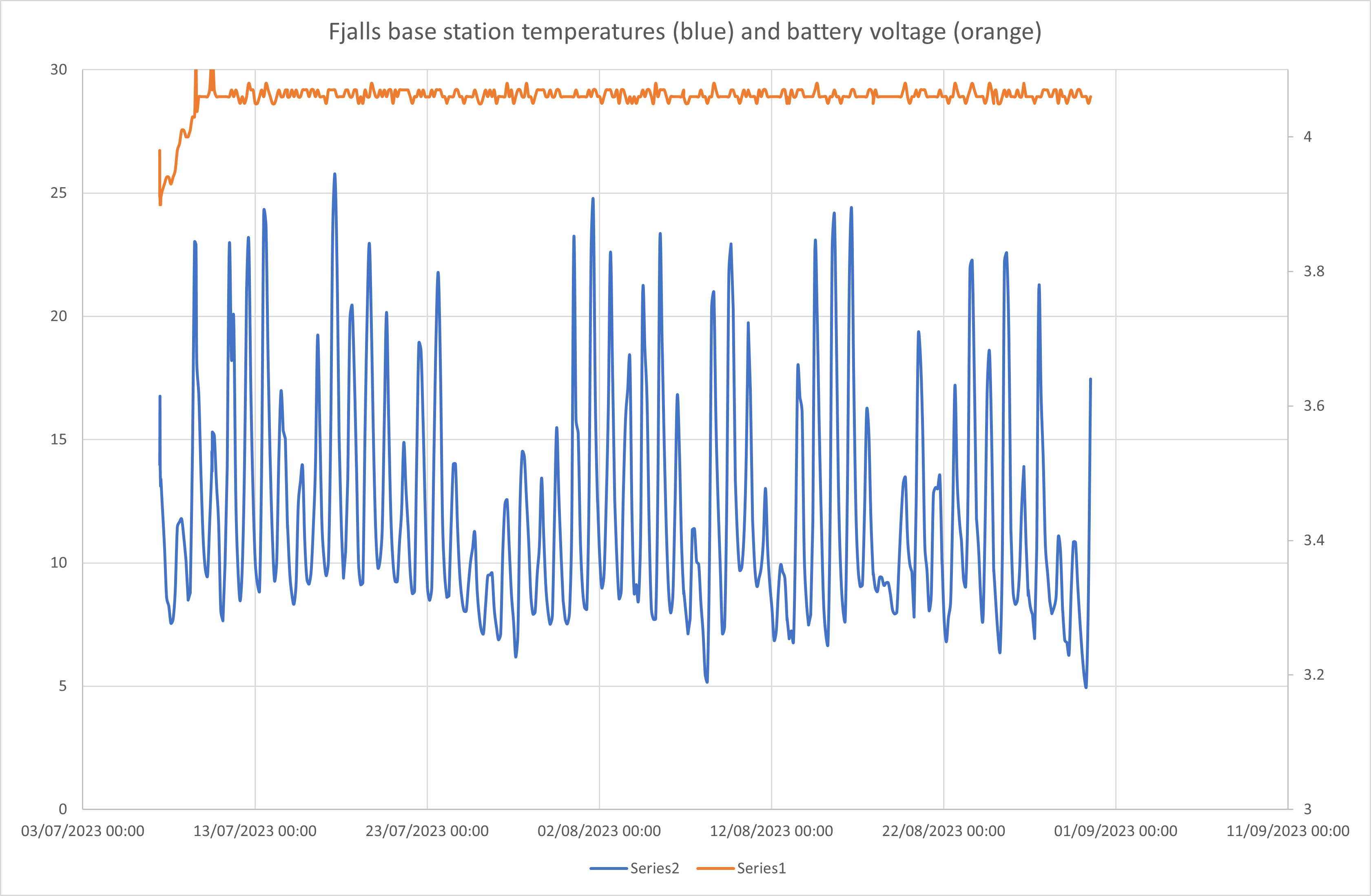
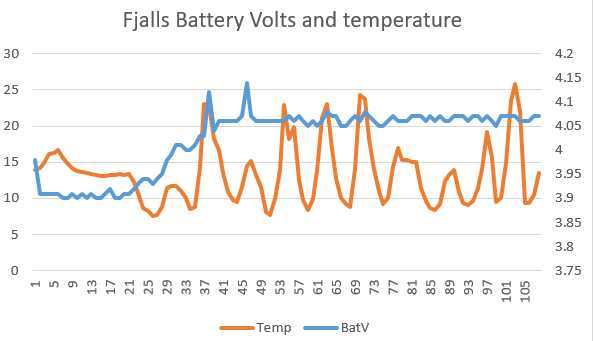
The Fjalls base station had lent over during the winter but was otherwise OK. In fact it was working apart from the disconnected 2G data link (the network was shut down). It had stored the data in flash (as it is meant to do) so we retried hundreds of data points from it! Battery was full!

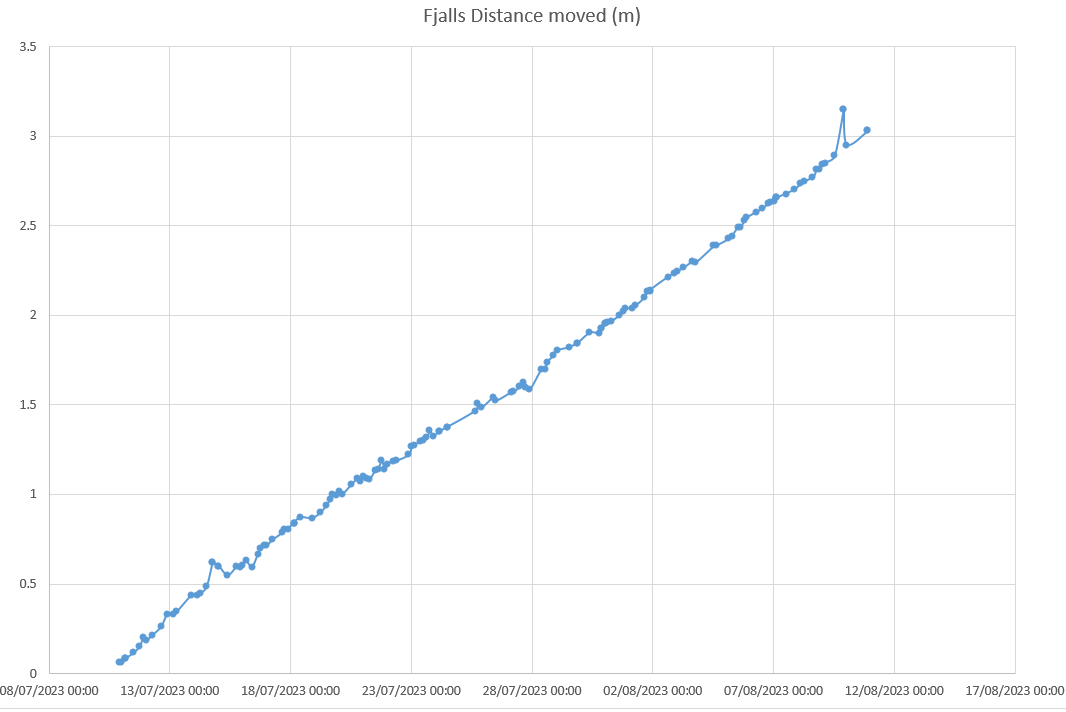
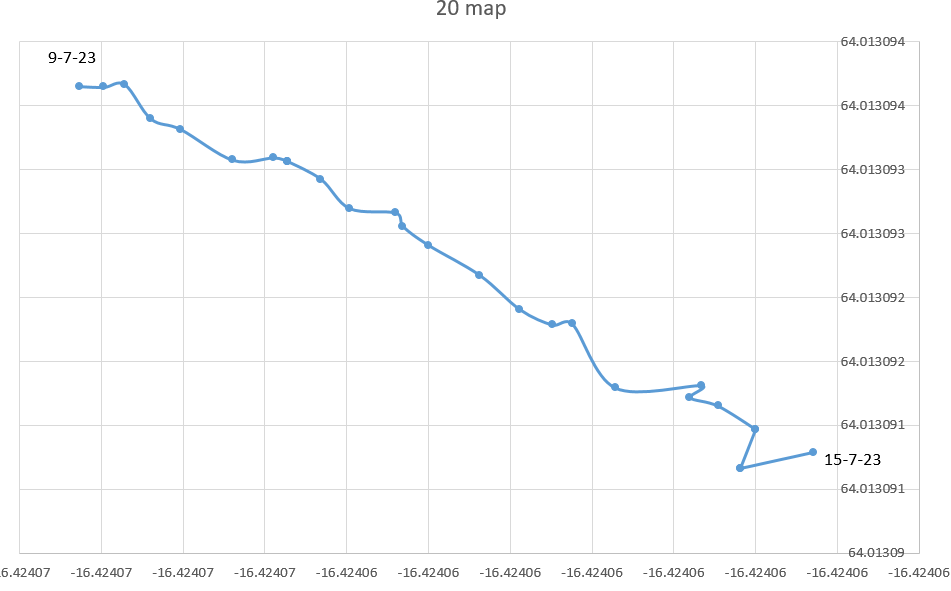
The weaker and lighter v2 quadpods tended to bend in the winter – we underestimated the forces involved. However the node was still working OK! This Fjalls tracker looked like it would drop into the lake soon.

We retrieved the Fjalls rover which was going to fall off the ice cliff later in the year – it had been working OK too – and its battery was in good condition.

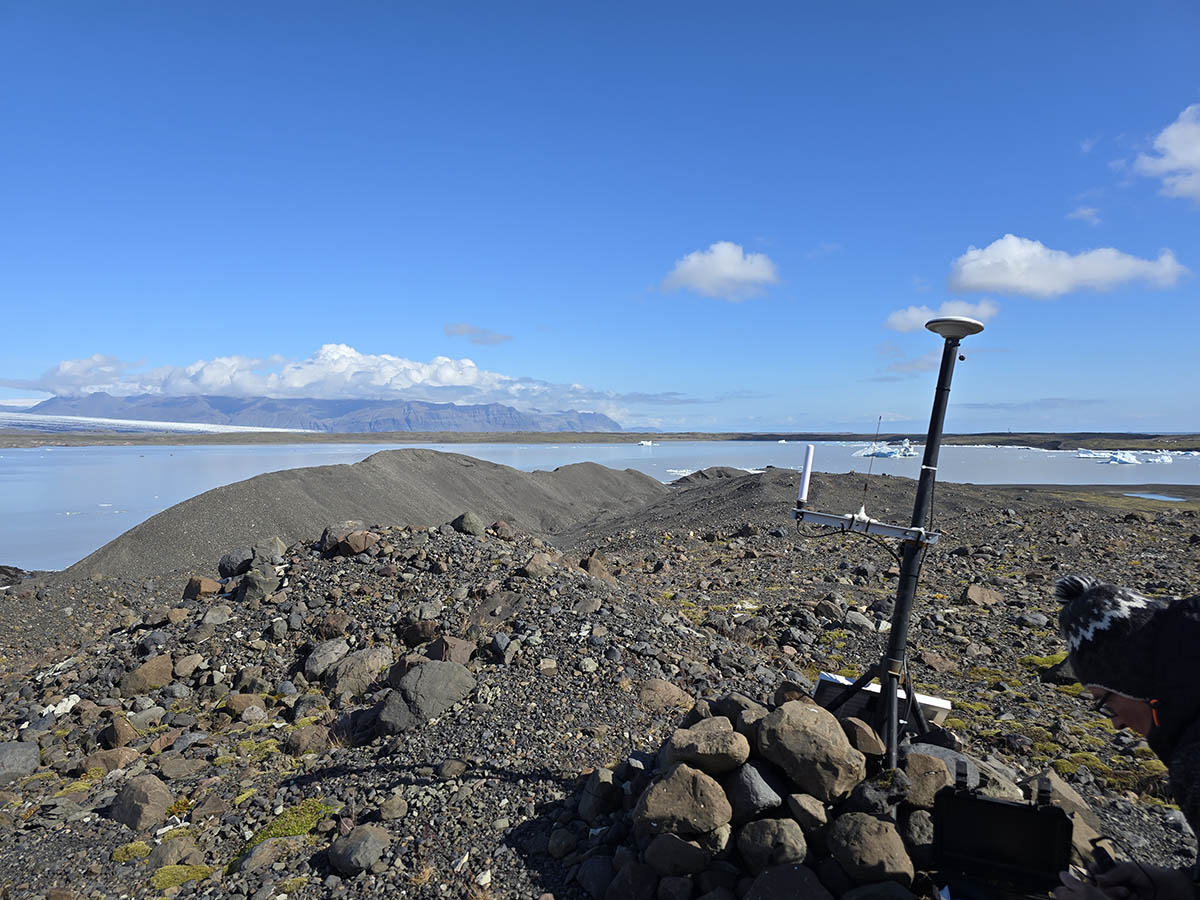
On Breida we walked up to the highest tracker using a location read from its base station (again unsent to UK due to 2G). This tracker has the heli-placed weaker quadpod attached to a stong v1 quadpod and had survived the winter well.

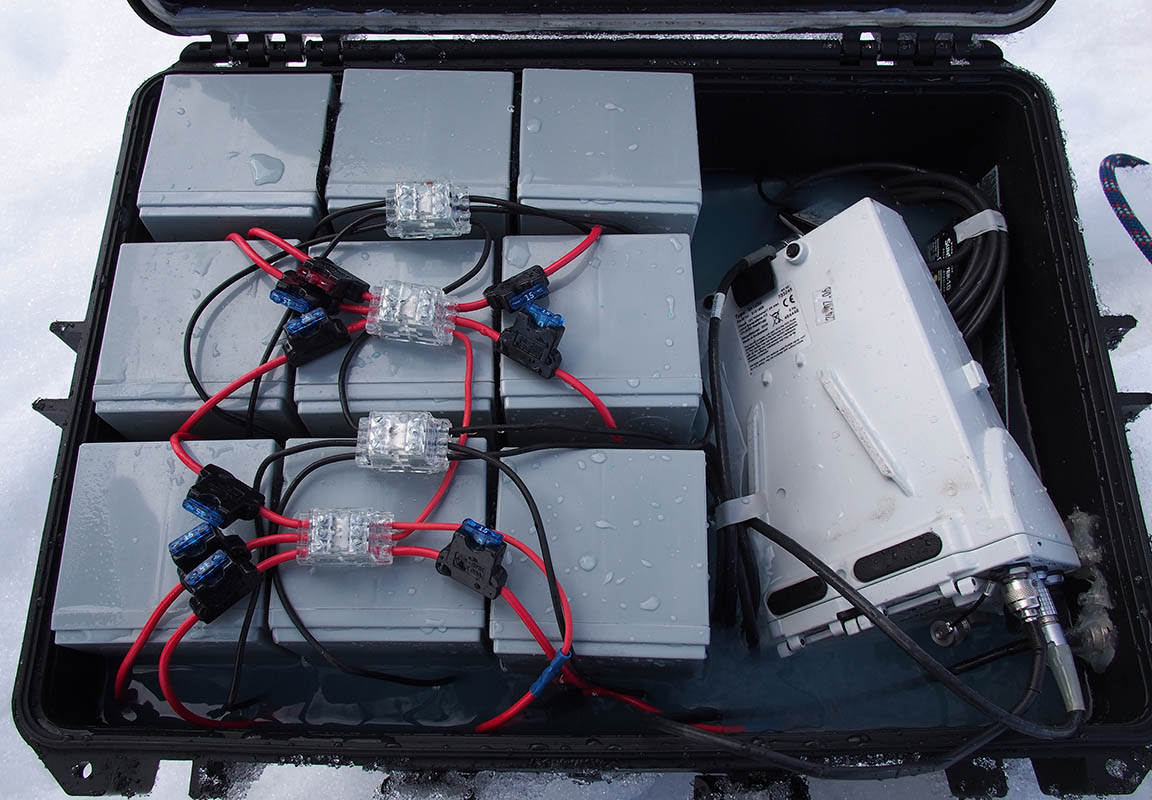
The Breida base station was in good condition considering the year it spend there in the open. It also had hundreds of data points saved! Its battery was also full – showing our new battery+solar system worked well.
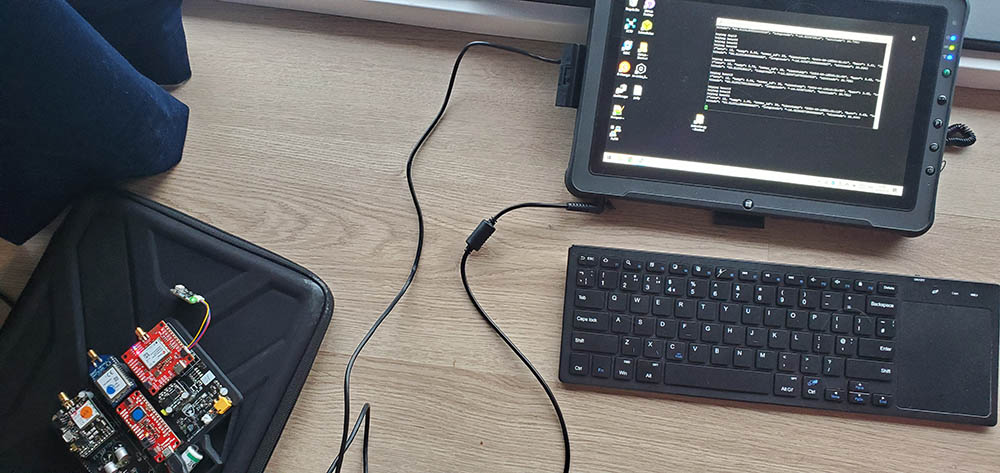
A wierd problem was that so may data files had been stored that the tiny microprocessor could not list all the files. So I wrote an exhaustive searcher which worked its way from august, every day, hour, minute and second.. backwards – so we could see if we had data! It worked incredibly slowly – but when we got back to Southampton I swapped the controller board with a more powerful one and it exported all the data ok!

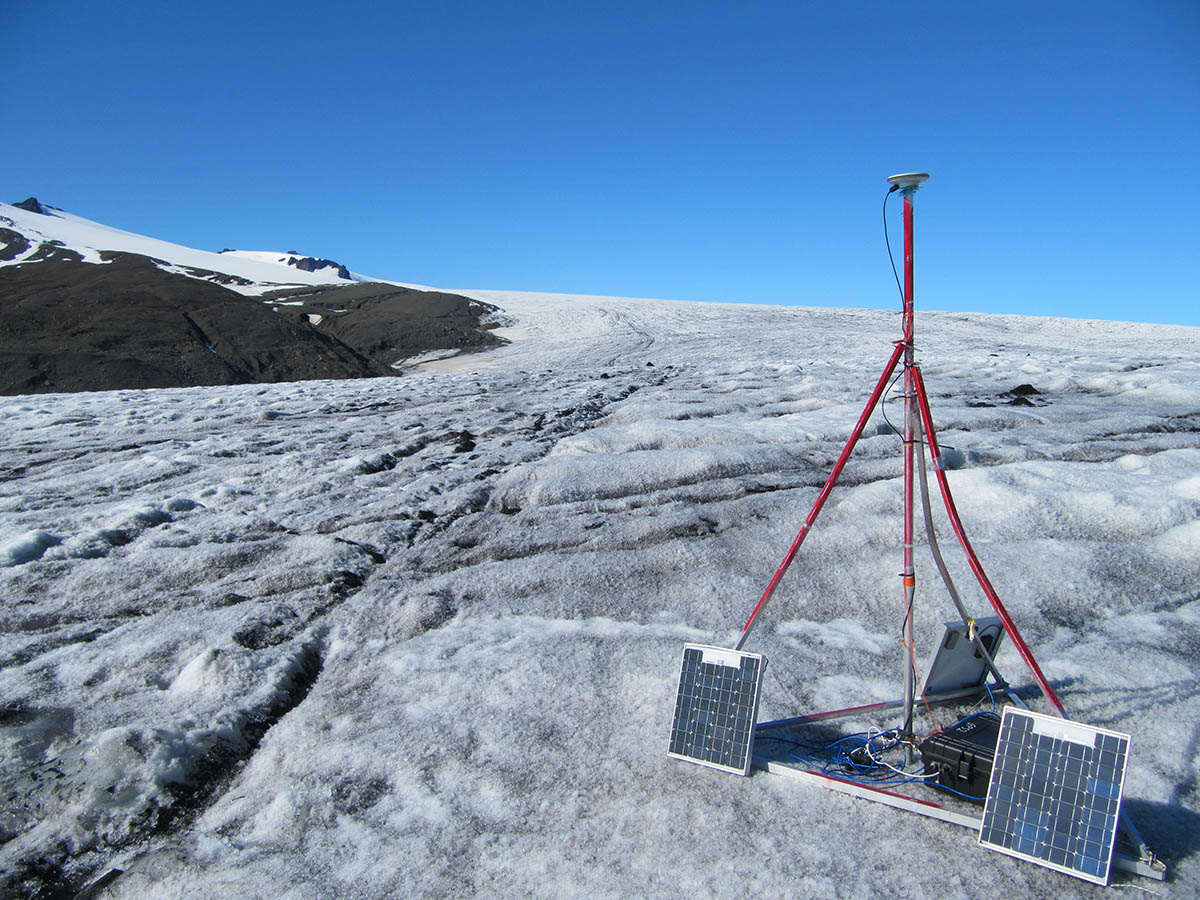
Like last year we used an Emlid DGPS base station to record GNSS data for post processing our drone surveys.

We used a combination of DJI Mavic Enterprise (seen here) and a Matice 300 + P1 camera to re-survey the glacier margin and lake-margin (also an esker we had never seen in person!)

The flight-plans were re-used from the previous year so we could capture the same areas easily.

This year we tried the new land rover defender – and it worked very well – including up/down the moraine near Breida.

A successful end to the project – good surveys and more data than we hoped for. Here we are on breida (you can tell by the surface!).