first we installed a new base station closer to the breidamerkurjokull glacier – which had retreated a lot! The new base uses GPRS to send rover data directly to our server.

then installed rover19 at 100m altitude on the glacier

carrying the Fjalls rover20 up to the glacier

new rover20 on Fjalls
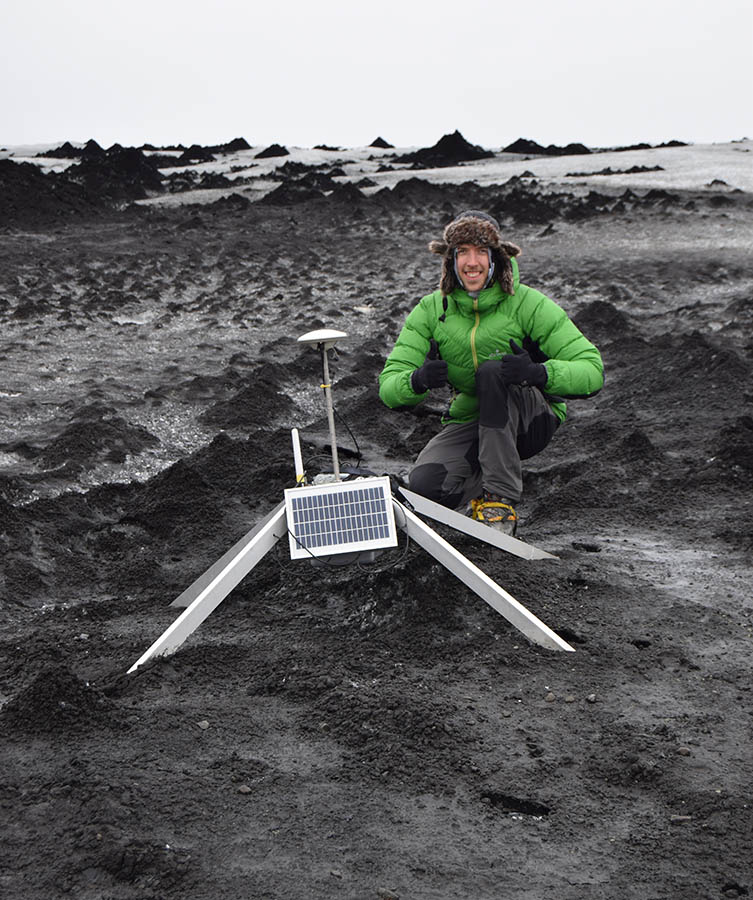
We did our first tracker placement using the large UAV (Matrice 300) about 1km away on Breida at an altitude of 130m. We used a camera+release mechanism which gave us a down-looking feed to place it precicely in a safe area (which we can walk to). This tracker 21 has a smaller GPS and radio antenna and a light-weight “quadpod”.