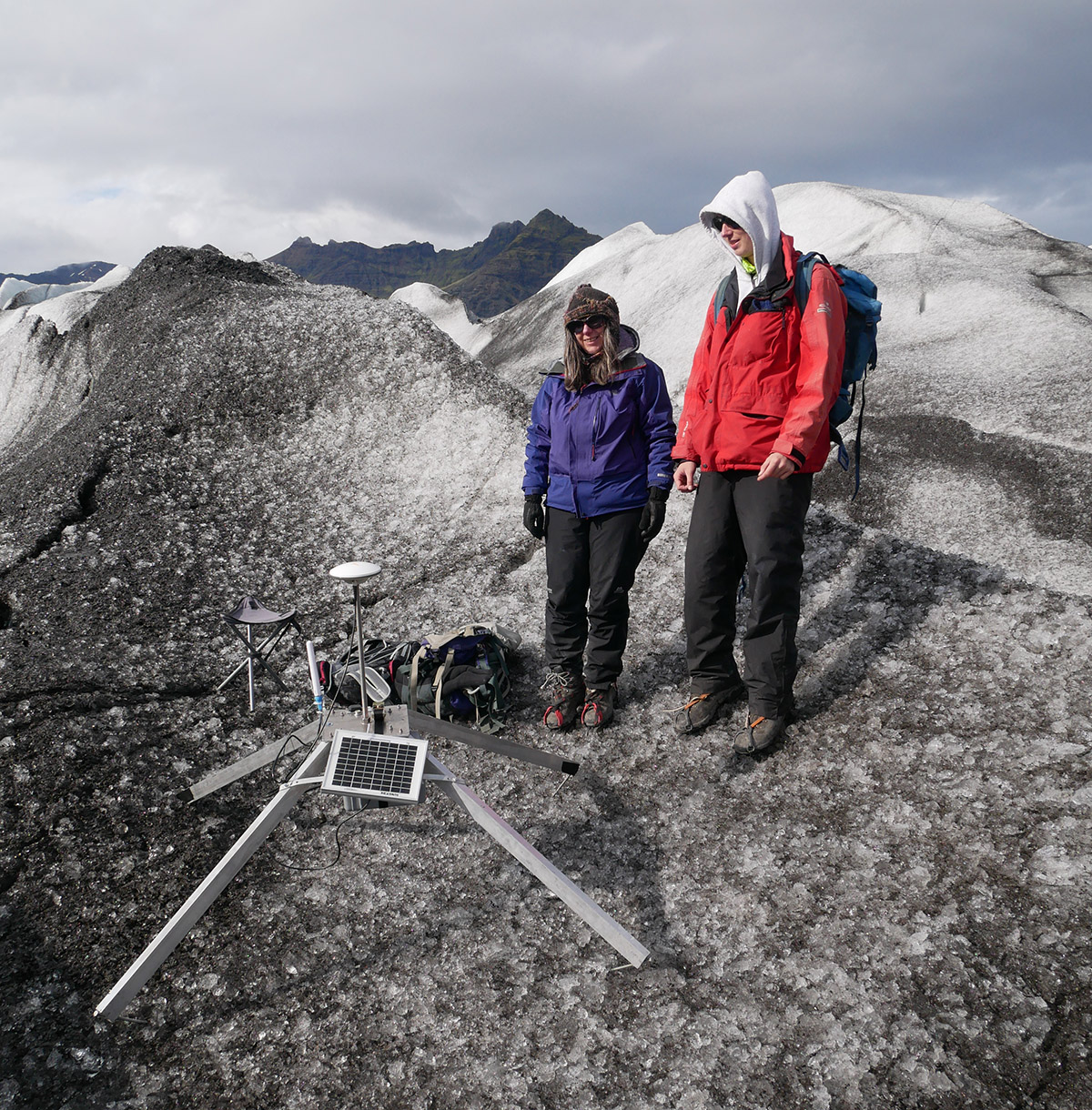
In our mountainsensing project we showed that fully standard communications could cover large areas. For that project we had to add an 868MHz transceiver to our designs. This year we are doing a lot of development with the Atmel SAMR30 based system-on-chip as it includes a sub-GHz radio and has good support in the RIOT-OS. One important thing to test was the typical range to make sure it was similar to our roughly 1km with the previous CC1120. Here is a photo of a quick test in the New Forest which achieved 1km with this set of antennas: