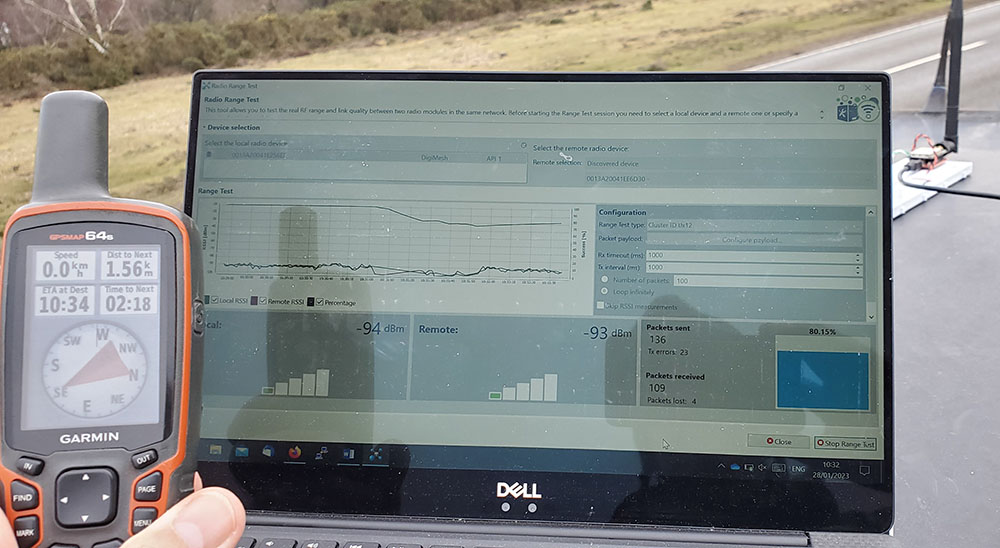
Range testing xbee SX868

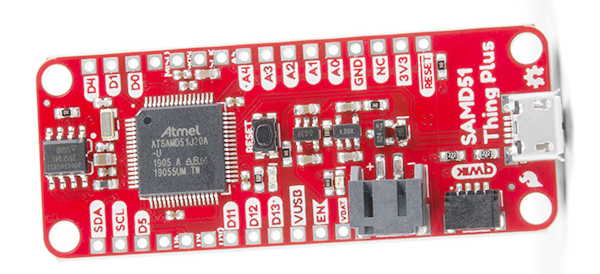
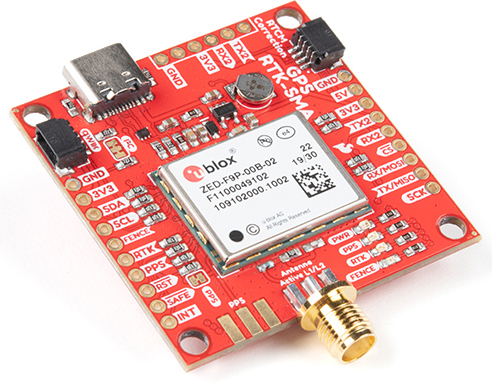
Thanks to a lot of work by students over the past year we are on track to producing our new u-blox based trackers for Iceland this summer
We installed a Browning HP4 camera on the Fjalls base station pole to test it as a way of getting a long sequence of timelapse images. It has their solar panel fitted (small one half way up) – and is filled with lithium AA batteries.

The camera will take a couple of photos after sunrise and before sunset – it is very restrictive on timelapse unlike the Brinno cameras.

To see if a time-lapse camera would be useful in measuing rough lake depth changes we installed a Brinno again in 2022. It is set to take one photo every day at noon.


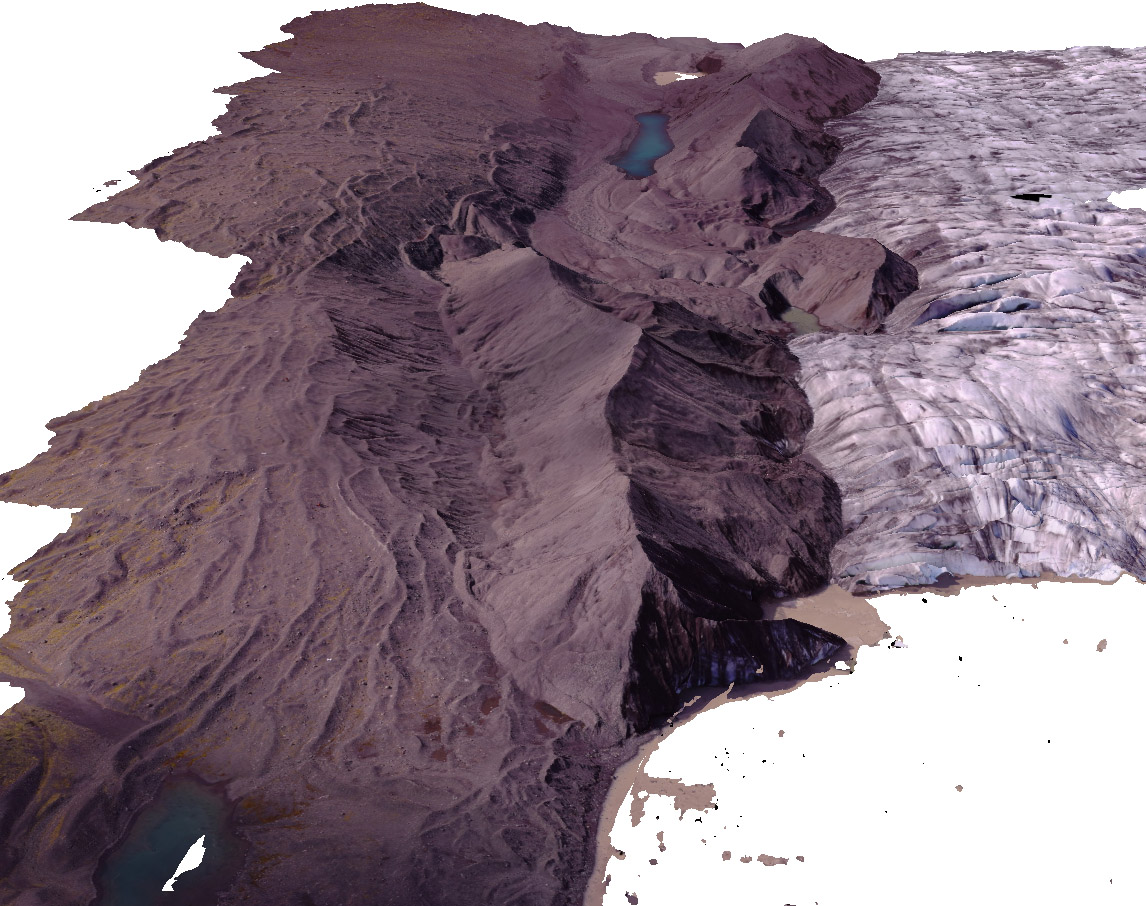
If you zoom into JPEG images from the Zenmuse P1 camera they look “damaged” so I took a view from a stationary (on a table) Matrice300 in jpg and raw. Converted the raw simply to tiff, cropped both to look at a small area in focus:



The conclusion is capture RAW only on the P1 and batch convert later. Each raw is 86MB rather than 5-7 MB (which was suspiciously compressed for such a high resolution image) so you will need 10x the SD card space/disk space.
We have been doing more tests on the Swarm pico-sat coms with a view to using their system in Iceland.
This graph shows the temperature measurements during 6 days – showing the solar panel charging. On average the modem used 52mA but the battery was providing more like 120mA due to the LEDs and feather board.

Swarm have a system of tiny satellites (11x11x2.8cm) for low data rate communications anywhere on earth. This enables lower cost data access to very remote places.

In my first test I received my message on their Dashboard within a minute (I was not timing!)
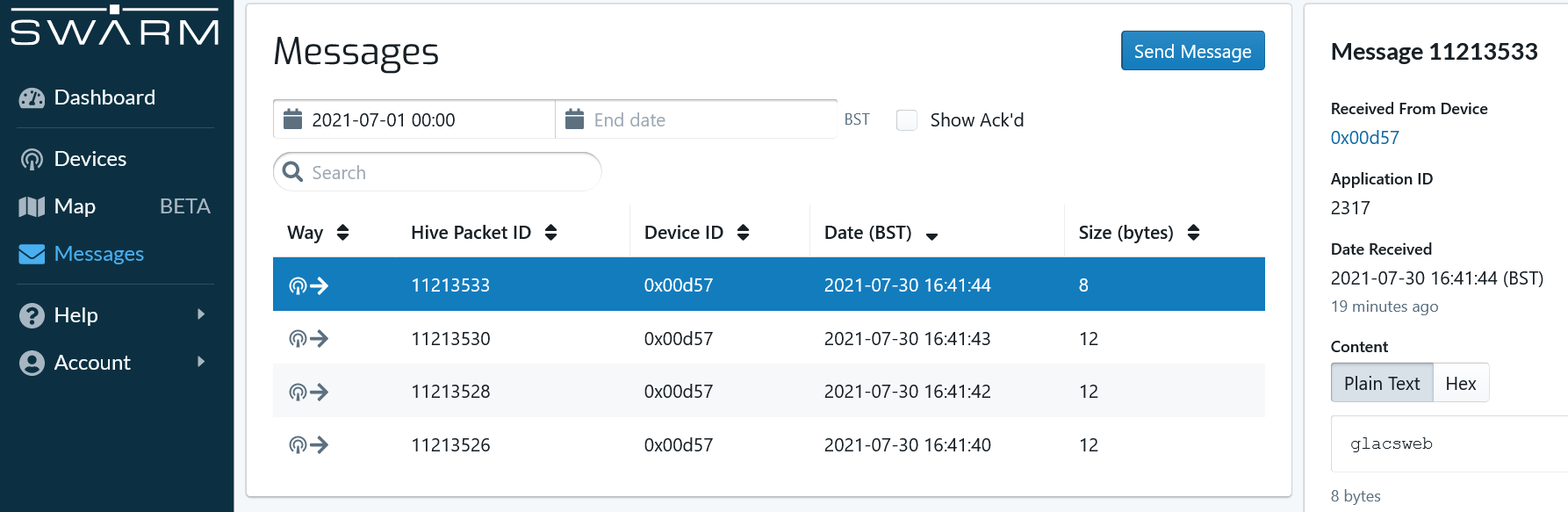
A maximum of 192 bytes can be sent on one message – which is OK for batches of sensor readings. Their cloud (“Hive”) has a RESTful API to gather the data easily. We look forward to building an environmental sensor network test with the help of the Swarm team!
In our mountainsensing project we showed that fully standard communications could cover large areas. For that project we had to add an 868MHz transceiver to our designs. This year we are doing a lot of development with the Atmel SAMR30 based system-on-chip as it includes a sub-GHz radio and has good support in the RIOT-OS. One important thing to test was the typical range to make sure it was similar to our roughly 1km with the previous CC1120. Here is a photo of a quick test in the New Forest which achieved 1km with this set of antennas:
